
Constructiebedrijf en machinefabriek MCM in Liessel heeft sinds kort tussen een tweetal verticale bewerkingscentra een zogeheten Proloader opgesteld. Dit automatiseringssysteem met schuifladenmagazijn en een robot maakt een manarme productie mogelijk en heeft een gunstig effect op de doorlooptijd.
De nieuwe Proloader van BMO Automation die sinds eind vorig jaar bij MCM opgesteld staat tussen twee bestaande, verticale YCM bewerkingscentra overtuigt door het doordachte concept. Kenmerkend is het magazijn met een vijftal schuifladen waarop uitgangsmaterialen en werkstukken gepositioneerd liggen. De schuifladen kunnen ook dienen als bufferopslag voor werkstukken die eerst op het ene en dan op het andere bewerkingscentrum verspaand worden.

De Proloader van BMO Automation is door Promas geleverd aan MCM in Liessel. Achter de vijf schuifladen staat de Motoman robot opgesteld tussen de twee bewerkingscentra. Promas heeft de Proloader geplaatst, de software-aanpassingen aan de machines verzorgd en de Proloader in bedrijf genomen (foto’s: Reinold Tomberg)
Motoman robot
Achter het rek met de vijf schuifladen staat een Motoman robot opgesteld. Deze robot, met een capaciteit van 50 kg, verzorgt de handling door de cel: halffabrikaten naar de machineklemmen, bewerkte werkstukken of deels bewerkte werkstukken retour naar een schuiflade, het omkeren van de werkstukken voor een volgende bewerking en het naar voren halen en naar achteren schuiven van schuiflade om uitgangsmateriaal of werkstukken te kunnen laden of lossen op een schuiflade.
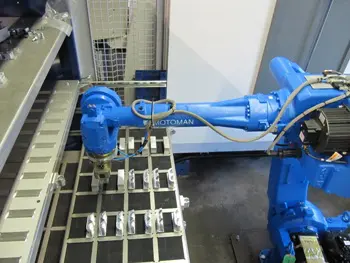
De robot bezig met laden en lossen in een schuiflade. In het midden van de lade de opname waarmee de robot de lade kan openen en sluiten. Op de lade het lasergesneden raster voor de positionering van materiaal en werkstukken
Posittioneren handwerk
Het positioneren van het uitgangsmateriaal is als vanouds handwerk dat de machineoperator verzorgt aan de voorzijde van de Proloader, dus buiten het bereik van de robot. Om de werkstukken op een bekende nulpuntpositie te kunnen plaatsen zijn de laden voorzien van platen van 1600 mm x 520 mm waarin met behulp van een laser rasters kunnen worden gesneden. Op deze manier ontstaan aanlegvlakken waartegen het uitgangsmateriaal op een bekende positie opgesteld kunnen worden voor de robot.
